
فهرست مطالب
مقدمه
یک موتور التراسونیک با استفاده از امواج التراسونیک با فرکانسهای بالا بیش از 20،000 هرتز که انسان قادر به شنیدن آن نیست، روتور(rotor) را میچرخاند. موتور التراسونیک با استفاده از عناصر پیزوالکتریک امواج التراسونیک تولید میکند، در حالی که موتورهای معمولی از آهنرباهای دائمی یا کویل برای چرخاندن روتور استفاده میکنند. عنصر پیزوالکتریک بسته به اختلاف پتانسیل الکتریکی بین دو ترمینال، متورم و منقبض میشود و این تورم و انقباض مکرر، امواج التراسونیک را تولید میکند[1].
موتورهای التراسونیک چگونه حرکت میکنند؟
در شکل ساده یک موتور التراسونیک، تعدادی عنصر پیزوالکتریک با فاصله مساوی در پایین یک میله بلند و نازک چسبانده شدهاند. هر عنصر پیزوالکتریک دیگر به یک ترمینال متصل است. به دو ترمینال منبع تغذیه AC داده میشود که فازهای شکل موج آنها برعکس یکدیگر است. عناصر پیزوالکتریک بسته به ولتاژهای اعمال شده منبسط و منقبض میشوند و یک موج التراسونیک در داخل میله تولید میکنند. و موج التراسونیک به سطح بالای میله منتقل میشود. رسانایی به پارامترهای مختلفی مانند اندازه عنصر پیزوالکتریک، فاصله بین عناصر مجاور، ولتاژ تغذیه و فرکانس آن، ضخامت و جنس میله و غیره بستگی دارد[1].
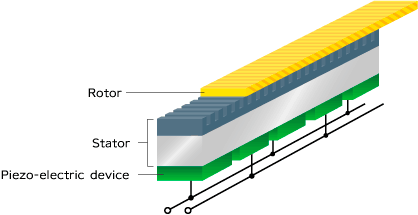
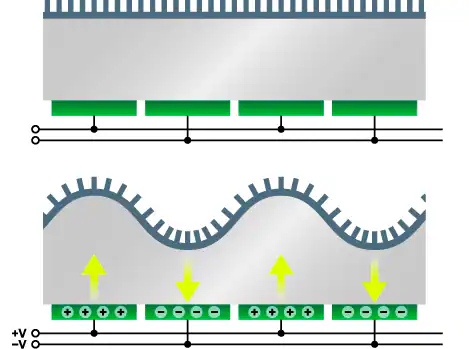
با اعمال ولتاژ AC به عناصر پیزوالکتریک در پایین دسته، یک موج سینوسی روی سطح میله ایجاد میشود. با حرکت سینوسی بسیار جزئی میله، روتور نیز شروع به حرکت میکند. حال یا موتور ما از نوع خطی است، همانطور که در تصاویر نشان داده شده است، یا از نوع دیگری مانند دایرهای. با این وجود، روند اساساً یکسان است.

مزایای موتور التراسونیک
موتورهای التراسونیک باید در ابعاد کوچک، گشتاور بالایی داشته باشند. در مقایسه با موتورهای الکترومغناطیسی معمولی، این موتورها چندین ویژگی متمایز دارند، مانند ساختار ساده، سرعت پایین، راندمان بالا و عدم وجود نویز الکترومغناطیسی. همچنین به دلیل اینرسی کم قطعات متحرک، در شروع و توقف، پاسخ سریع و ویژگیهای کنترلی خوبی دارند.
شکل ساده یک موتور التراسونیک گشتاور خروجی پایینی تولید میکند، در نتیجه ما از نسخه متفاوتی از موتور التراسونیک برای تولید گشتاور خروجی بیشتر استفاده میکنیم.
انواع موتور التراسونیک
موتورهای التراسونیک را میتوان به انواع تماسی و غیر تماسی طبقهبندی کرد. موتورهای نوع تماسی برای ایجاد حرکت به نیروی اصطکاک بین عنصر ارتعاشی و یک روتور متکی هستند، در نتیجه، این موتورها دارای یک عیب هستند و آن این است که سطوح تماس بین استاتور(stator) و روتور در اثر اصطکاک فرسوده میشوند..
از سوی دیگر، موتورهای التراسونیک نوع غیر تماسی از امواج ایستاده یا امواج سیار برای ایجاد حرکت گرهای استفاده میکنند و امکان عملکرد بدون تماس را فراهم میکنند. هر نوع مزایای خود را دارد و بر اساس الزامات کاربرد انتخاب میشود[3].
در انوع غیر تماسی، روتور روی استاتور که به صورت قائم در حال ارتعاش است، توسط جریان آکوستیک القا شده در فضای بین استاتور و روتور میچرخد. این موتورها نویدبخش طول عمر بالا، سرعت بالا و اندازه کوچک هستند[4].
-در این مقاله به بررسی انواع موتور التراسونیک تماسی خواهیم پرداخت.
-برای درک بهتر بخش بعدی این مقاله، به شما توصیه میکنم بخش، ارتعاشات حالت LT را مطالعه کنید. اگرچه بسیار سادهسازی شده خواهد بود. برای کسب اطلاعات بیشتر، لطفاً به لینک 5 مراجعه کنید.
ارتعاشات حالت LT
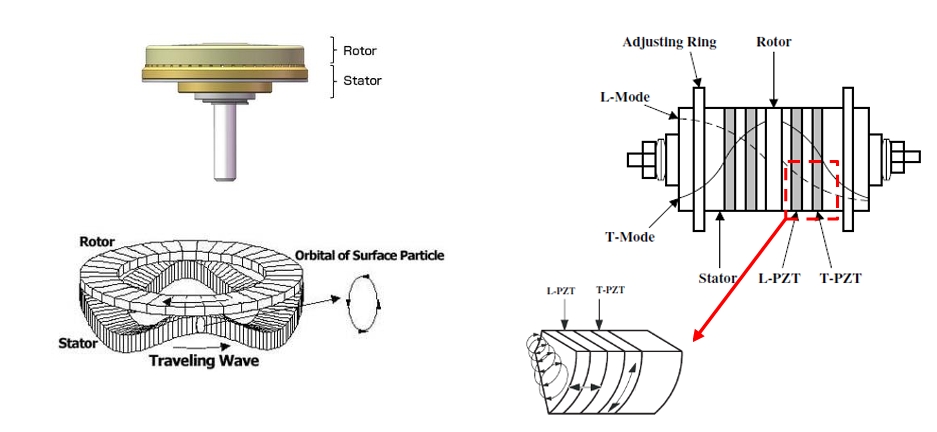
برای ترانسدیوسر های نوع لانگوین، یک روش از دو مجموعه پیزوسرامیک استفاده میکند؛ یکی قطبی در جهت طولی(L) و دیگری قطبی در جهت مماسی(T)، که به ترتیب امواج طولی و پیچشی تولید میکنند که متعاقباً در موجبر جرم جلویی ترکیب میشوند. موجبر به گونهای طراحی شده است که کل ترانسدیوسر در حالتهای طولی و پیچشی در فرکانس یکسان رزونانس داشته باشد. این رویکرد پیچشی بالایی را به همراه دارد، که نسبت جابجایی پیچشی به جابجایی طولی در سطح خروجی ترانسدیوسر است، اما از نظر پیچیدگی در طراحی مکانیکی و تحریک الکتریکی دارای معایبی است. این روش همچنین به دیسکهای پیزوسرامیک قطبی مماسی گرانتری نیاز دارد و همانطور که انتظار میرود، حفظ تطبیق فرکانس بین دو رزونانس در شرایط بار مختلف میتواند دشوار باشد[5].
حالت ارتعاش ترکیبی LT در دو نوع مختلف از موتورهای التراسونیک به کار گرفته میشود.
موتورهای التراسونیک چند درجه آزادی (Multi-DOF)
برخلاف موتورهای التراسونیک استاندارد (که در یک جهت حرکت میکنند – چرخشی یا خطی)، موتورهای اولتراسونیک چند درجه آزادی میتوانند با استفاده از یک محرک فشرده، در چندین جهت (مثلاً X-Y-Z + چرخش) حرکت کنند. آنها این کار را با ترکیب چندین حالت ارتعاش (مانند امواج طولی، خمشی و پیچشی) در یک عنصر پیزوالکتریک انجام میدهند.
1- حالتهای ارتعاش ترکیبی – استاتور (بخش مرتعش) برای تولید دو یا چند نوع موج التراسونیک (مثلاً امواج ایستاده + متحرک) طراحی شده است.
2- کنترل حرکت دقیق – با تنظیم فاز و دامنه سیگنالهای ورودی، موتور میتواند بین حرکات مختلف (مثلاً چرخش و لغزش) تغییر حالت دهد.
3- حرکت مبتنی بر اصطکاک – روتور (یا لغزنده) هنگام فشار دادن به استاتور مرتعش حرکت میکند و امکان حرکت همهجهته را فراهم میکند.
موتور پیزوالکتریک هیبریدی:
این نوع از دو ترانسدیوسر پیزوالکتریک به عنوان استاتور استفاده میکند؛ ترانسدیوسر اول به صورت طولی برای تولید حرکت L عمل میکند، در حالی که ترانسدیوسر دیگر به صورت مماسی برای تولید حرکت T عمل میکند. این حرکات از طریق نیروی اصطکاک بین سطوح تماس بر روی قسمت روتور اعمال میشوند. به منظور تطبیق رزونانس ارتعاشات L و T، یک جرم اضافی به استاتور(ها) اضافه میشود تا بر فرکانسهای ویژه این مدها تأثیر بگذارد. یک روش تطبیق جایگزین از یک نیروی فشاری استفاده میکند که بین استاتور(ها) و روتور اعمال میشود تا شرایط رزونانس مد L را تغییر دهد تا با مد ارتعاش T منطبق شود[6].
موتور التراسونیک با استفاده از مبدل ارتعاش LT:
این مبدل فقط توسط ترانسدیوسر ارتعاش طولی هدایت میشود. این مبدل از یک ساختار استوانهای با شکافهای مورب برش خورده در امتداد محیط آن تشکیل شده است که با صفحه گرهای حالت ارتعاش L تنظیم میشود. این نوع به دلیل طراحی ساده و تولید گشتاور بالا همراه با الزامات تحریک ساده مورد استفاده قرار میگیرد[6].
کاربردهای موتور التراسونیک[3]
-رباتیک و اتوماسیون
-تجهیزات پزشکی
-هوافضا و دفاع
-لوازم الکترونیکی مصرفی

